Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

版本:V1.0.0
2024.12.09
目录
一、 手册概述
二、 平衡飞行器安装
1. 硬件连接
2. 头显配置
3. IP地址匹配
三、 平衡飞行器调试
手册目的
本手册旨在快速安装平衡飞行器,同时调试平衡飞行器动作范围,适应使用场景下俯仰动作范围变动问题。
适用对象
本手册适用有硬件和软件基础知识的工作人员。
STM32的板子需要连接:
1) 电源;
2) 网线;
3) 传感器与STM32板子连接。
传感器引脚与板子引脚对应动作:
pitch 绿:2 黄:4
yaw 白:1 蓝:3
tip:四种颜色分别代指传感器的四根线,数字指STM32板子的引脚编号。
FlightSeat.apk
http://www.wemakexr.cn/plugins/FlightSeat/FlightSeat.apk
FlightSeat_test.apk
http://www.wemakexr.cn/plugins/FlightSeat/FlightSeat_test.apk
Test
http://www.wemakexr.cn/plugins/FlightSeat/Test.ziphttp://www.wemakexr.cn/plugins/FlightSeat/FlightSeat.zip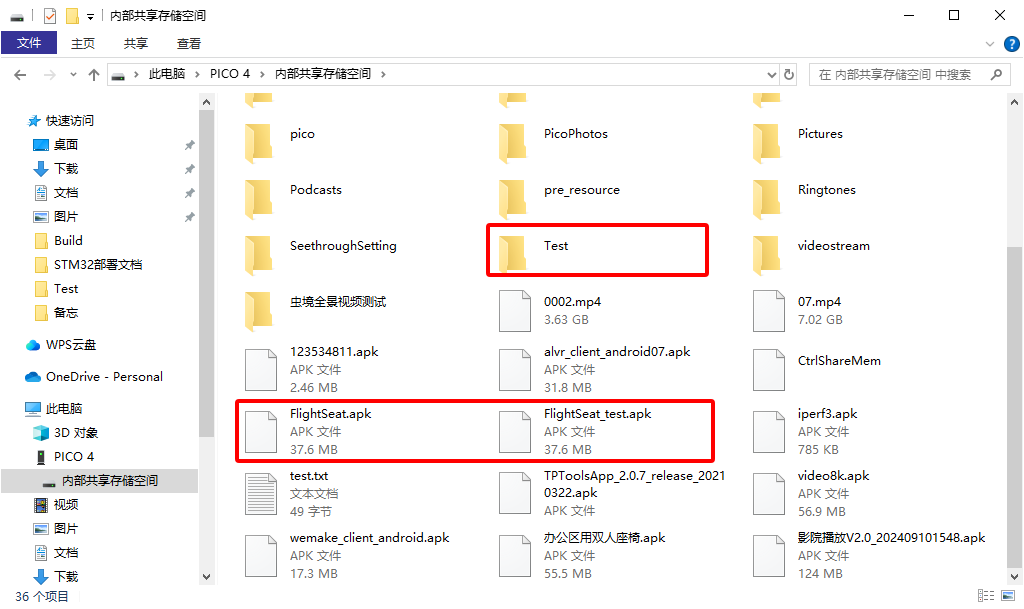
.apk包首次安装后打开,需要联网
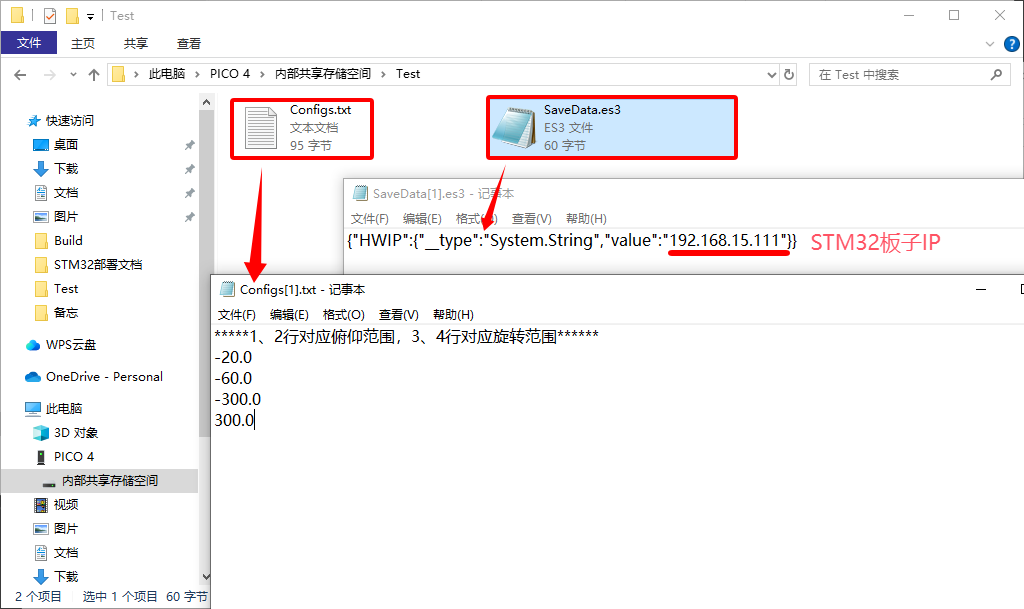
Test文件夹中包含Configs.txt和SaveData.es3文件
1) Configs.txt文件:调节动作范围;
2) SaveData.es3文件:STM32板子IP。
确认连接STM32板子的网线对应路由器IP第三段地址,头盔连接该网络的WiFi,确保在同一局域网内。
若需要修改STM32板子IP,根据如下网址中的文档修改板子IP:
下载AnimalControlerDemoV1.2.zip,使用方法见文档
http://www.wemakexr.cn/DocumentCenter/%e5%8a%a8%e7%89%a9%e5%a4%96%e8%ae%be%e6%b5%8b%e8%af%95%e4%bd%bf%e7%94%a8%e6%96%87%e6%a1%a3/
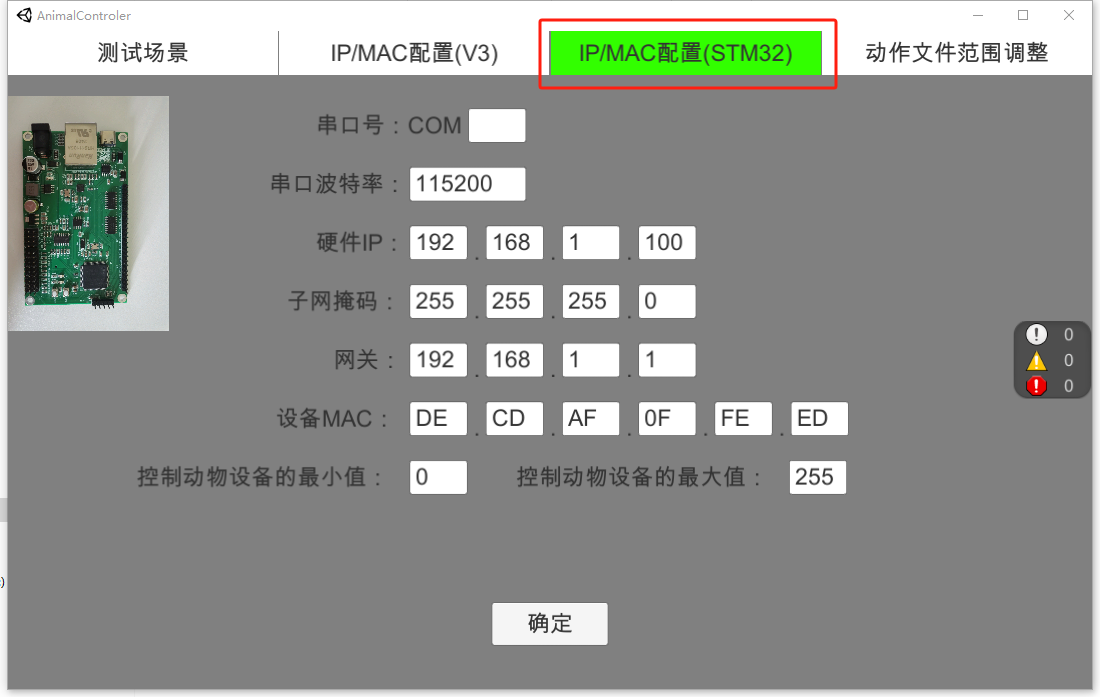
板子IP修改完成后,记得将SaveData.es3文件中的IP修改一致。
连接好网线后,同一路由下,ping一下网络,网络通表示板子网络通信没有问题。
步骤一
将平衡飞行器置于平衡位置;
步骤二
安装FlightSeat_test.apk并打开,观察头显界面显示的【俯仰真实值】的数值x并记录;
步骤三
卸载刚刚安装的FlightSeat_test.apk;
步骤四
将Configs.txt中的第一个数据改成刚刚记录的数值x,第二个数据改成x-40;
步骤五
安装FlightSeat.apk并打开即可。