Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

DFRobot Xboard V3控制器,使用信号引脚为A0和A1
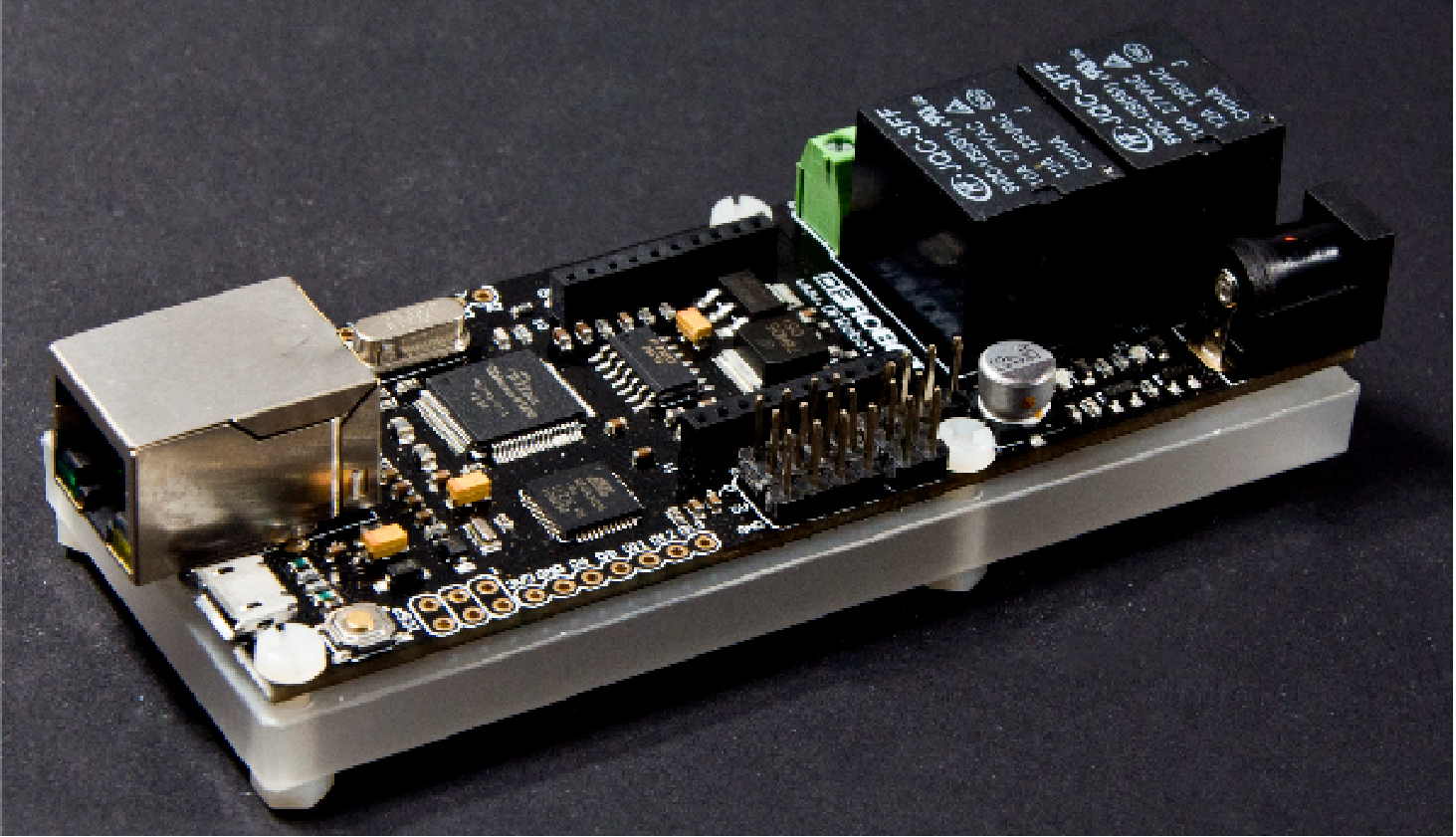
STM32F407主控板,使用信号引脚为A0和A1

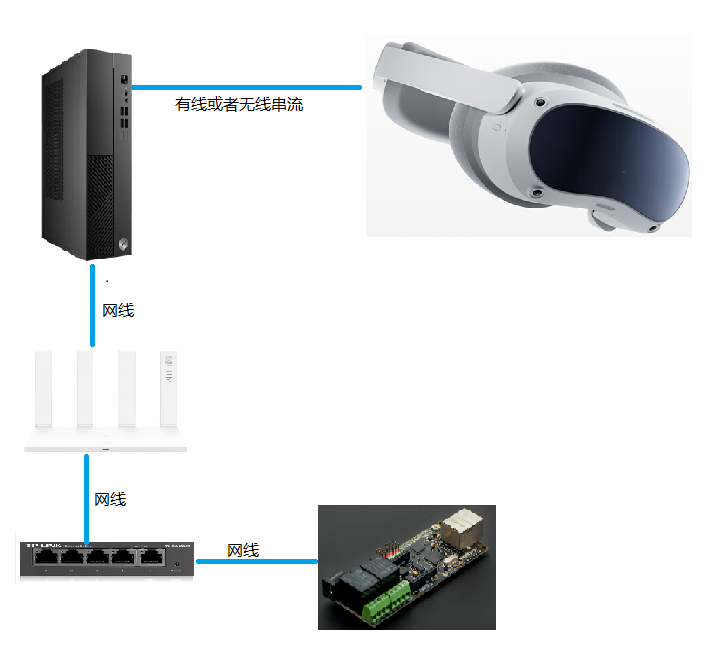
吊椅、控制板、传感器、路由器、交换机、网线若干、电线若干、插排、(电脑)、头盔(包括一体机)
控制板供电:
可以使用DC电源(5V1A)通过控制板的DC口直接供电,也可以使用USB插头(5V1A)+Micro数据线通过控制板的Micro口供电,这两种方式根据实际使用环境选择与购买
拉线传感器接线:
面向前方,右侧接控制板A0口,左侧接控制板A1口,传感器的数据线、供电线、地线依次对应A0与A1口的I/O、5V、GND三个针脚
产品尺寸:长:830mm 宽:860mm 高:1580mm
产品配色:黑色
产品重量:10kg
使用主机功率:800w/220V(包含电脑)
占地面积:0.72 m²
最大承重:100kg
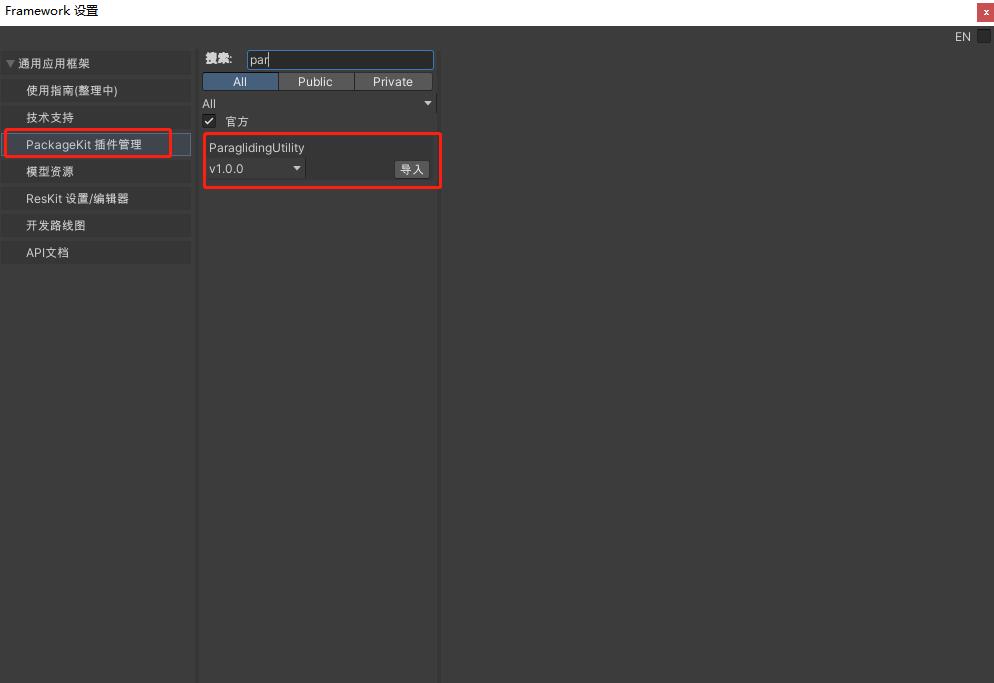
下载并导入 WFramework
在 WFramework 中下载插件,插件名称为:ParaglidingUtility
/// <summary>
/// 初始化
/// </summary>
/// <param name="IP"> 控制器的IP </param>
void Init(string IP); /// <summary>
/// 获取右侧值(0 - 1)
/// </summary>
float GetRightValue();
/// <summary>
/// 获取左侧值(0 - 1)
/// </summary>
float GetLeftValue();
/// <summary>
/// 收到消息时调用
/// </summary>
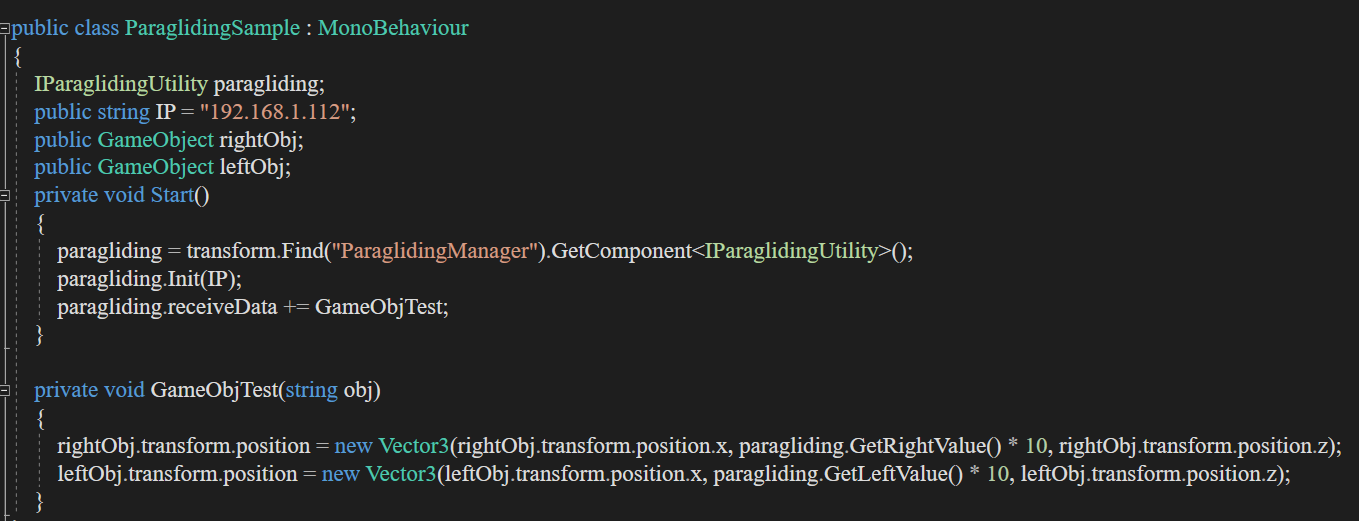
event Action<string> receiveData;在场景中添加两个脚本:ParaglidingSample.cs 和 ParaglidingManager.cs
在 ParaglidingSample.cs 中获取 ParaglidingManager 实例
使用 IP 初始化,然后注册事件
通过 GetRightValue() 和 GetLeftValue() 获取右侧和左侧传感的值
若为初次使用硬件,则先串口写IP
http://www.wemakexr.cn/DocumentCenter/%e4%b8%b2%e5%8f%a3%e8%ae%be%e7%bd%aeip%e5%b7%a5%e5%85%b7/
插件下载
http://www.wemakexr.cn/plugins/huaxiangsan/huaxiangsan.zip
本插件为蓝图文本插件,依赖OSC插件,OSC插件需要打开UE4插件界面启用OSC(Open Sound Control)
将txt中全部内容粘贴到蓝图的事件图表中,在开始运行时设置硬件IP和本机IP,以及InitClient和InitServer

拉动拉线传感器,OSCServer收到消息后会将左右拉线值量化为0-1的模拟量,分别保存在rightValue和leftValue变量中