一、硬件部分
1. 硬件部署清单。
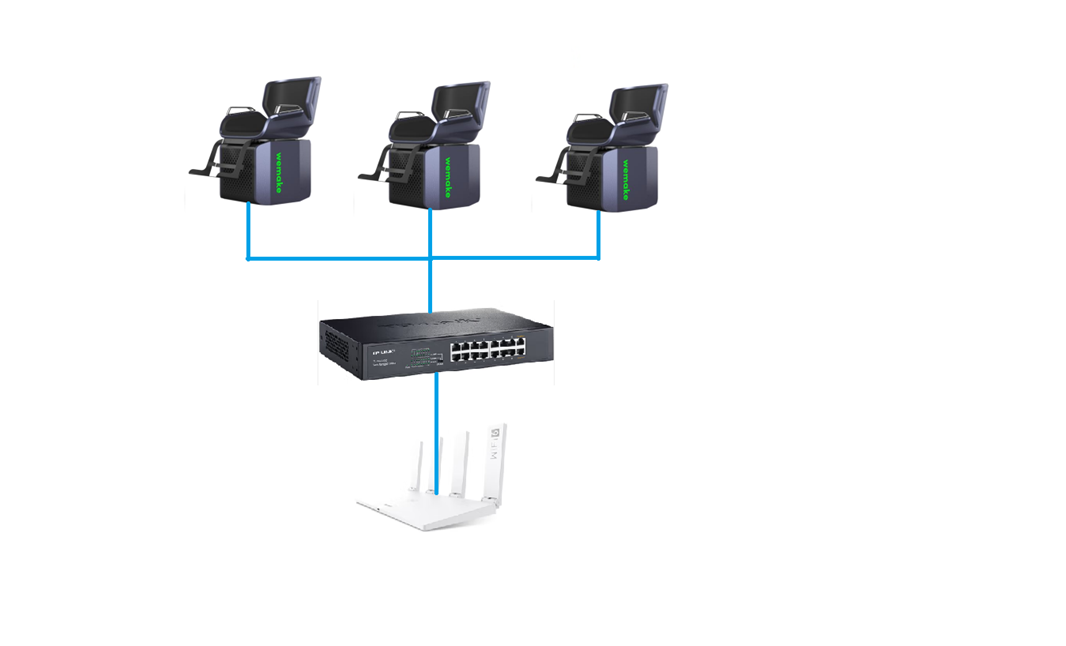
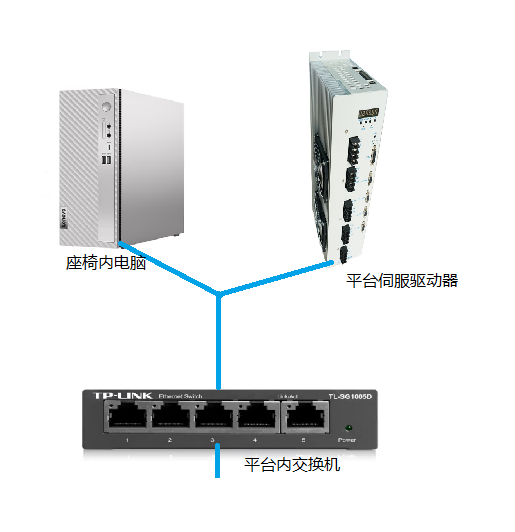
2. 硬件拓扑图
3. 产品参数说明
3.1 简约版参数说明:
- 自由度:三自由度
- 运动表现:上下、左右、前后
- 运动角度:±15°
- 线加速度:200mm/s
- 行程:150mm
- 产品尺寸:长:980mm 宽:650mm 高:1038mm
- 产品配色:经典蓝、呼吸绿、黑白配
- 产品重量:100kg
- 额定功率:2000w/220V
- 占地面积:0.94 m²
3.2 竞技版参数说明:
- 自由度:三自由度
- 运动表现:上下、左右、前后
- 运动角度:±15°
- 线加速度:200mm/s
- 行程:150mm
- 产品尺寸:长:990mm 宽:650mm 高:1530mm
- 产品配色:黑色、红色
- 产品重量:100kg
- 额定功率:2000w/220V
- 占地面积:0.95 m²
3.3 舒适版参数说明:
- 自由度:三自由度+360°旋转
- 运动表现:上下、左右、前后、旋转
- 运动角度:±15°
- 线加速度:200mm/s
- 行程:100mm
- 产品尺寸:长:1145mm 宽:1000mm 高:1230mm
- 产品配色:150kg
- 产品重量:3000w/220V
- 额定功率:3000w/220V
- 占地面积:2.05m²
3.4 双人座椅参数说明:
- 自由度:三自由度
- 运动表现:上下、左右、前后
- 运动角度:±5°
- 线加速度:200mm/s
- 行程:100mm
- 产品尺寸:长:1500mm 宽:1200mm 高:1100mm
- 产品配色:底座(黑色、白色),座椅()
- 产品重量:100kg
- 额定功率:2000w/220V
- 占地面积:2 m²
3.5 皮划艇平台参数说明:
- 自由度:三自由度
- 运动表现:上下、左右、前后
- 运动角度:±5°
- 线加速度:200mm/s
- 行程:100mm
- 产品尺寸:长:2670mm 宽:820mm 高:720mm
- 产品配色:底座(黑色、白色),皮划艇(蓝白色、绿色)
- 产品重量:100kg
- 额定功率:2000w/220V
- 占地面积:3 m²
二、插件部分
1. 插件下载
下载并导入 WFramework
2. 插件导入。(殷乐负责)
3. 插件初始化。(殷乐负责)
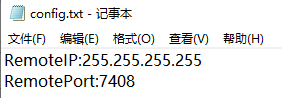
4. 插件连接。(殷乐负责)
三、主动控制
1. Unity 插件调用方式。(殷乐负责)
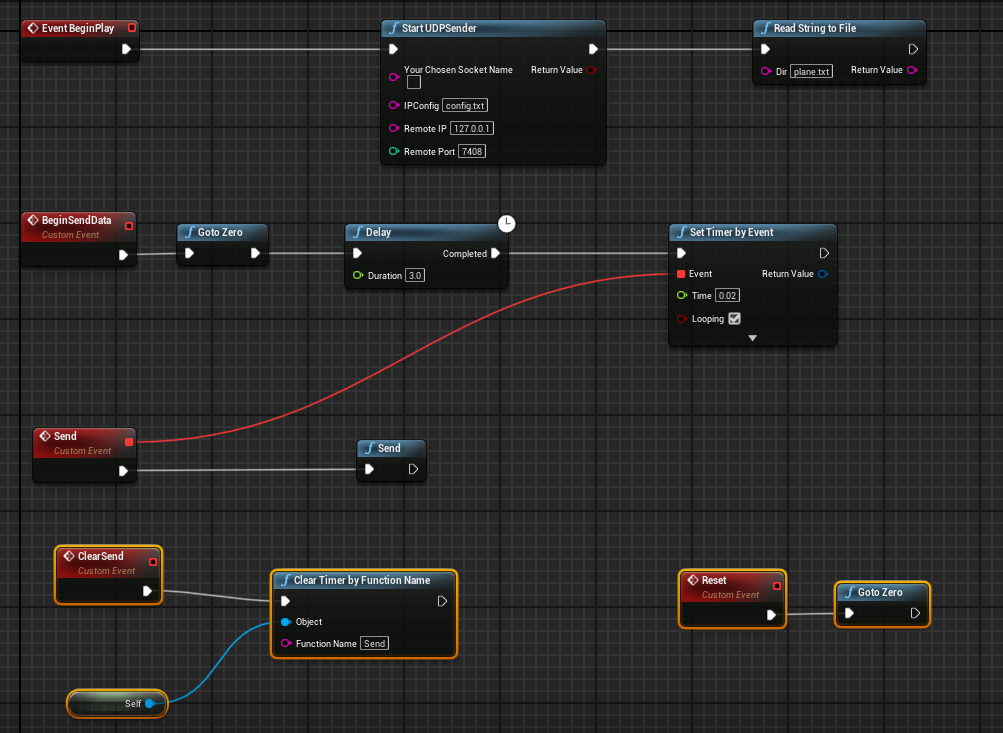
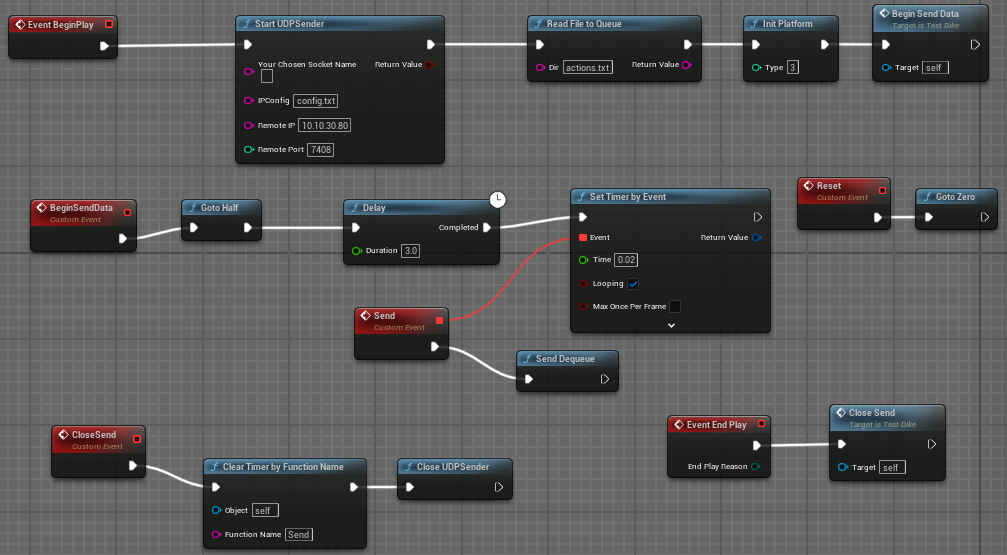
2. UE4 插件1.0版调用方式。
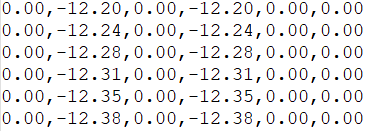
1. 动作文件编辑
动作编辑器使用文档
2. 内容播放。
当前内容:
- 航空航天:火星任务、神州五号、天宫空间站、嫦娥奔月、星际穿越
- 古诗词:送元二使安西、池上、静夜思、暮江吟、清明
- 自然科学:大天鹅、大象罗拉、恐龙
- 人文历史:甲午海战、南极探险
- 海洋航海:深海奇遇、深海奇遇过山车、蛟龙号、深海巨鲨
- 军事科学:055驱逐舰、094核潜艇、81192战机、黄海行动、歼20战机、海军70周年
- 定制宣传:大鱼岛、创智谷
五、动感影院播控系统
完整的软硬件安装使用流程请从网盘中提取
链接:https://pan.baidu.com/s/1BQ09NqsdhTBy3MTYyxUjQg
提取码:mrao
或者直接使用以下链接读取
安装使用说明书V1.4 20210301
六、外部内容驱动
1. 可驱动内容列表。(马玉婷负责)
2. 内容配置方法。(马玉婷负责)