Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124

所有调速/控制骑马机的数值均在动作文件第8位(从0开始,到9结束;0和9是空的没有动作)
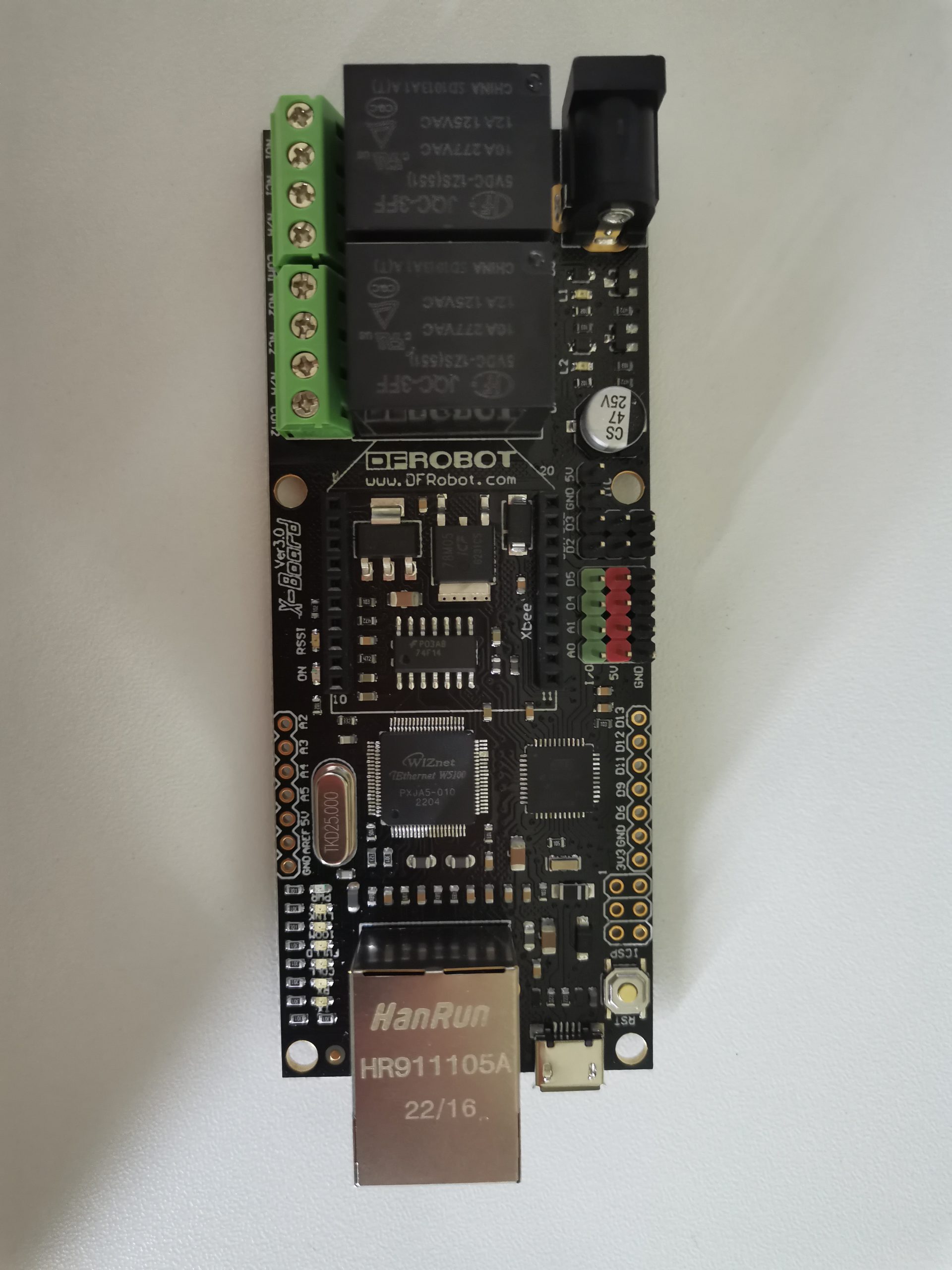
所有调速/控制骑马机的引脚均为D5(X-board V3)、D9(Arduino UNO+W5100)、A2(STM32F407)
X-board V3
STM32F407

动作文件对应的位数

所有只有骑马机一个动作的设备
8 底座摇摆 自控 D5/D9第一批
大霸王龙:
1 张嘴 高电平有效 A0
2 眨眼 高电平有效 A1
3 头左右 高电平有效 A2
4 颈上下 高电平有效 A3
5 前肢 高电平有效 A4
6 身左右 高电平有效 A7
7 尾摆 高电平有效 A8
8 身体上下 0-5V模拟信号,调速 D9
9大马
1 张嘴 高电平有效 A0
2 眨眼 高电平有效 A1
3 A2
4 颈上下 高电平有效 A3
5 腿 高电平有效 A4
6 A5
7 尾摆 高电平有效 D4
8 底座摇摆 自控 D5
9第二批
骆驼
0
1 张嘴 高电平有效 A0
2 眨眼 高电平有效 A1
3 头左右 高电平有效 A2
4
5
6
7 尾摆 高电平有效 A3
8 身体上下 0-5V模拟信号,调速 D9
9大象
0
1 张嘴 高电平有效 A0
2 眨眼 高电平有效 A1
3 头左右 高电平有效 A2
4 颈上下 高电平有效 A3
5
6 身左右 高电平有效 A4
7 鼻子 高电平有效 A5
8 身体上下 0-5V模拟信号,调速 D9
9第三批
鲨鱼、海豚、矮脚马
0
1 嘴 高电平有效 D4
2
3
4
5
6
7 尾摆 高电平有效 A1
8 底座摇摆 自控 D5
9斑马、翼龙、三角龙、小恐龙
0
1 嘴 高电平有效 D4
2
3 头 高电平有效 A1
4
5
6
7 尾 高电平有效 A0
8 底座摇摆 自控 D5
9长颈鹿、狮子
0
1 嘴 高电平有效 D4
2
3 头 高电平有效 A1
4 颈 高电平有效 A0
5
6
7
8 底座摇摆 自控 D5
9小象
0
1 嘴 高电平有效 D4
2 眼 高电平有效 A1
3
4 颈 高电平有效 A3
5
6
7 鼻 高电平有效 A0
8 底座摇摆 自控 D5
9大象
0
1 嘴 高电平有效 D4
2 眼 高电平有效 A1
3 头 高电平有效 A2
4 颈 高电平有效 A3
5
6 身 高电平有效 A4
7
8 底座摇摆 自控 D5
9大骆驼
0
1 嘴 高电平有效 D4
2 眼 高电平有效 A1
3 头 高电平有效 A0
4 颈 高电平有效 A2
5
6
7
8 底座摇摆 自控 D5
9小骆驼
0
1 嘴 高电平有效 D4
2
3 头 高电平有效 A1
4 颈 高电平有效 A0
5
6
7
8 底座摇摆 自控 D5
9长颈鹿
0
1 头 高电平有效 D4
2
3 嘴 高电平有效 A1
4 颈 高电平有效 A0
5
6
7
8 底座摇摆 自控 D5
9斑马
0
1 嘴 高电平有效 D4
2
3 头 高电平有效 A1
4
5
6
7 尾 高电平有效 A0
8 底座摇摆 自控 D5
9狮子
0
1 嘴 高电平有效 D4
2
3 头 高电平有效 A1
4 颈 高电平有效 A0
5
6
7
8 底座摇摆 自控 D5
9